With a PB-4 you can ...
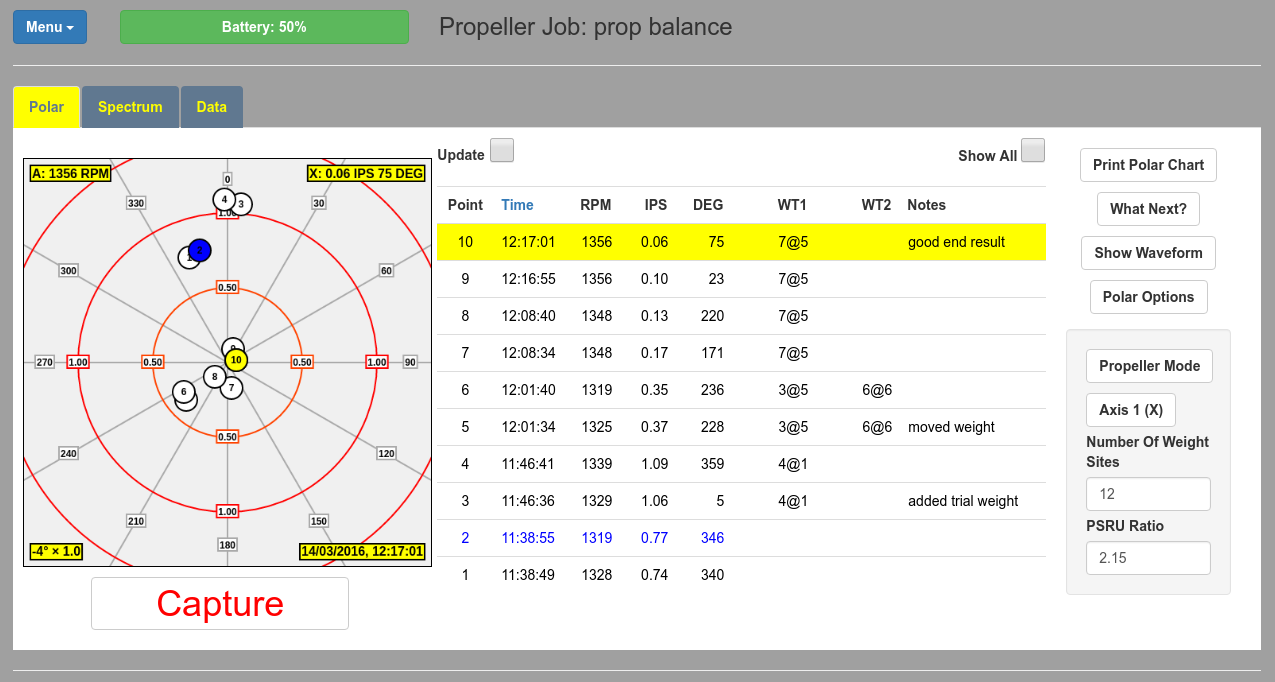
![]() Balance propellers
Balance propellers
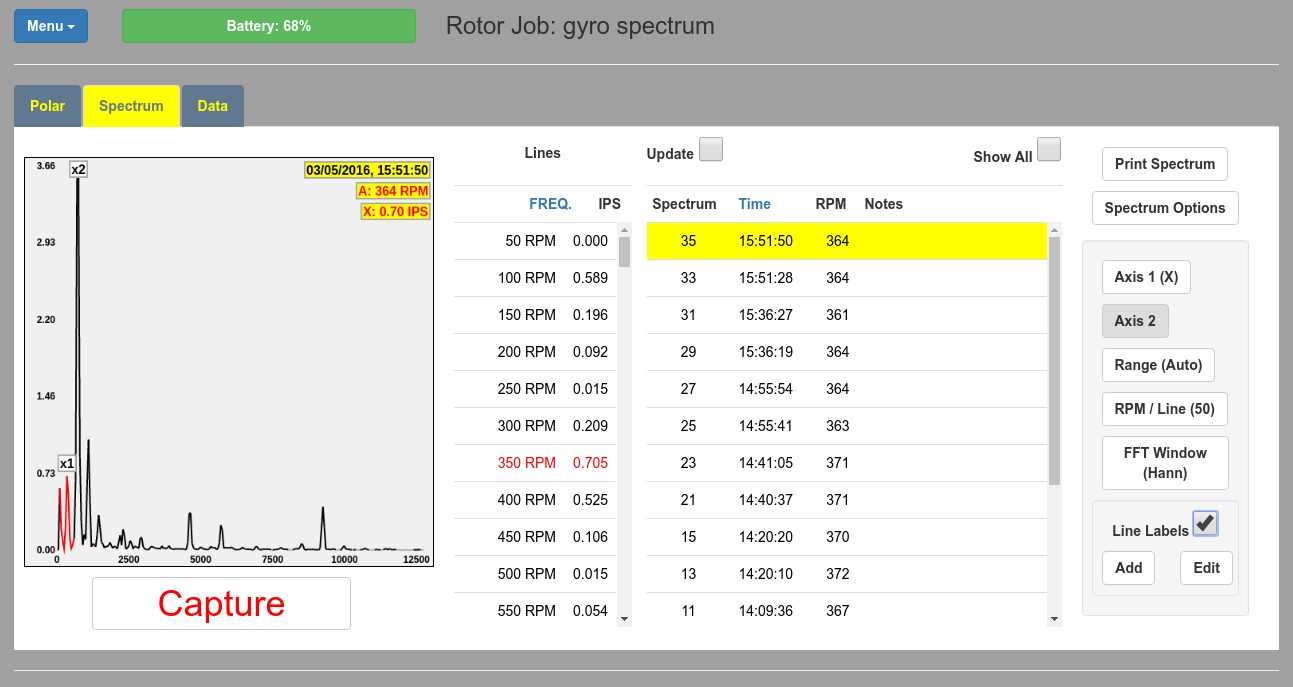
![]() Balance Gyroplane and Helicopter rotors
Balance Gyroplane and Helicopter rotors

![]() Analyse vibration problems
Analyse vibration problems
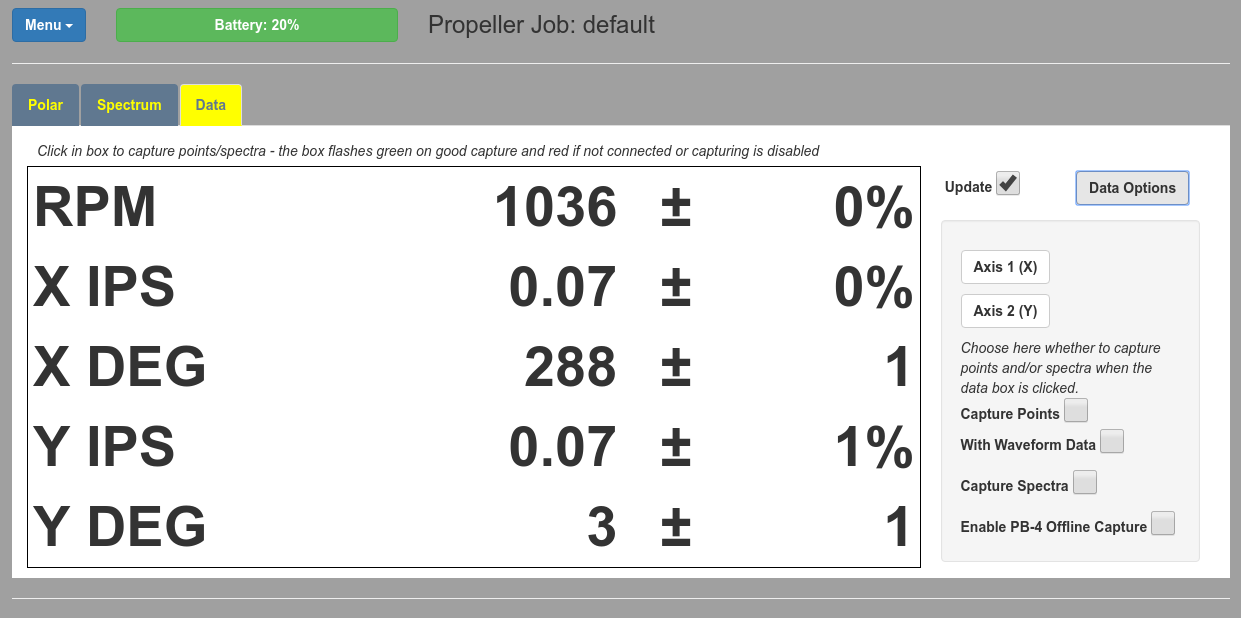
![]() View live data
View live data
The PB-4 is a sophisticated electronic device that measures the vibration produced by an out of balance propeller or rotor and sends the data to a tablet, smartphone, laptop, etc. for display.
It works with many different user interface devices: iOS devices (ipad, iphone), Android devices (tablets & phones), laptops (Linux, Macs, Windows), desktops (anything that has Wi-Fi and a modern browser).
The PB-4 can be used on a wide variety of propellers, engines and airframes - from Microlights to Warbirds, 2-strokes to Turboprops.
With a PB-4 you can ...
![]() Balance propellers
Balance propellers
![]() Balance Gyroplane and Helicopter rotors
Balance Gyroplane and Helicopter rotors
![]() Analyse vibration problems
Analyse vibration problems
![]() View live data
View live data
As an alternative to the browser based user interface, it is also possible to use the PB-3 Android Propeller Balancer App (from version 3.1 onwards) with the PB-4.
|
The PB-4 balancer kit comprises:
† standard length for the sensor cables is 3 metres - other lengths available on request. |

|
|
For propeller balancing, a plastic mounting plate is provided to attach the tacho sensor to the aircraft's cowling as is shown here: |

|
To purchase a PB-4, visit the shopping page.
A user interface device is not supplied with the PB-4.
For propeller balancing you will also need a mounting bracket for the vibration sensor if it cannot be directly attached to the front of the engine. Often this is simply a strip of metal with a couple of holes drilled in it. Exactly what is required depends on the engine type and installation.
|
For rotor balancing, one or two mounting brackets are required to mount the accelerometer and the tacho sensor. Often, only one bracket will be required for both sensors as shown here in this picture of the sensors mounted on the rotorhead of an ELA gyro: |

|

|
Here's another photo showing the sensors mounted on a Dynali Helicopter using a simple "L" shaped bracket. |
Full details of how the PB-4 is used can be found in these documents:
For your convenience, here are plainly formatted HTML versions of the above which can be used as input to a translation service (like Google translate).
Obviously, the English versions of the manuals are authoritive. The automated translations may well be incomprehensible, misleading and even factually incorrect (YMMV!)
You can now view PB-4 jobs using an online viewer. This is very useful as the user doesn't need to have access to a PB-4, just the job data.
Furthermore, the viewer incorporates a simulator that simulates the vibration source so that it is possible to become familiar with the PB-4 software and practice the propeller and rotor balancing procedures without using a real PB-4.
More information about the viewer / simulator along with tutorials that explain the propeller and rotor balancing procedures can be found here.
Vayavolo are an independent team based in France that provide rotor balancing training and general gyro vibration troubleshooting services worldwide. They can provide PB-4 training.
The PB-4 firmware is easily updated - when they become available, firmware updates can be downloaded from here.
The user interface device can be any computer/tablet/phone that has Wi-Fi and a browser that supports modern web standards (HTML5, CSS, Javascript & WebSockets are required).
The user interface is "responsive" in that the layout of the pages alters depending on the size/proportions of the screen. For cockpit use, the 7" form-factor tablet is ideal because it's large enough to make the user interface not too fiddly and not so large as to get in the way. When reviewing/printing results later, a normal laptop or PC provides the best experience.
The PB-4 has been successfully tested with the following browser versions:
To make it easy to access the PB-4 from an Android device, this pb4-finder app can be used. If necessary, it will first switch the Android device to use the PB-4 Wi-Fi network and then it will load the PB-4's web page into a browser.
Before you can install the app, you need to tell your Android device that it's OK to install non-Market applications.
Go to Menu > Settings > Security and make sure that the Unknown Sources checkbox is checked.
Copyright 2003-2023 Smart Avionics Ltd. (www.smartavionics.com)